BUSINESS
최고의 전문성과 신뢰를 바탕으로 4차 산업 환경에 융합이 되도록 최선을 다하겠습니다.
솔루션
Positioning solution
(위치기반 솔루션)
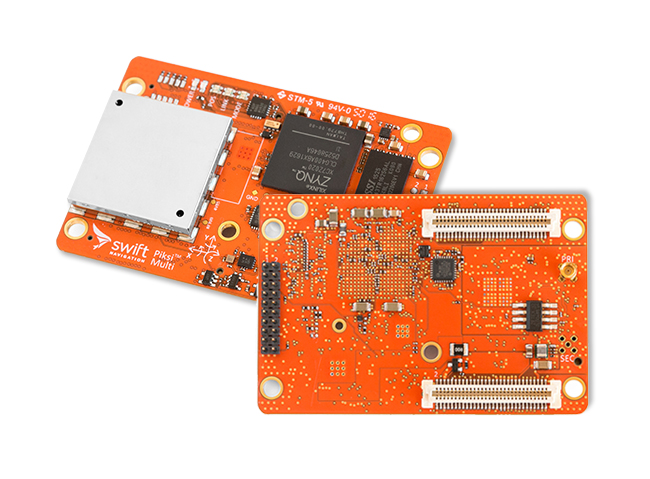
RTK와 다중 주파수를 사용하여 센티미터(cm)급의 위치 정확도를 얻을 뿐 아니라 빠른 위치계산(TTFF)도 가능하며 견고한 제품 구성과 가격 경쟁력을 갖추고 있어서 군집비행과 자동차, 철도 분야에서 다양하게 사용되고 있습니다.
고 정밀 위치 정확도(cm급)와 빠른 RTK 변환 시간
GNSS + RTK + IMU 기술 적용
다양한 Interface지원(UART, Ethernet, CAN5 and USB)
견고한 제품구성(Sock and Vibration 인증 : MIL-STD-810G)
적용 분야
-

자동차
센티미터(cm)급의 위치 정확도가 필요한 무인 자동차 분야(특히 제조업체 및 내비게이션 OEM 업체)에 저가의 수신모듈을 통해 비용 절감 효과
다양한 센서 인터페이스로 제품의 유연성 향상 및 안전 개선 효과
-

UAV(드론)
정교한 위치 오차(cm수준 이하)를 필요로 하는 드론의 군집비행기술에 적용되어 농업, 재난, 군사 정찰등의 특수 목적과 엔터테인먼트 분야에 활용
Piksi multi 제품은 작은 사이즈와 가벼운 무게로 다양한 형태의 드론에 탑재 가능
-

농업 자동화
농기계용 고 정밀 GNSS를 탑재하여 농업환경에 최적화 설계 가능
합리적 가격의 고 정밀 GNSS 솔루션을 사용하여 연료 사용을 개선, 행간 중복을 줄이고 비료 및 씨앗 배치를 모니터링하여 정확한 위치 중심의 작업이 가능
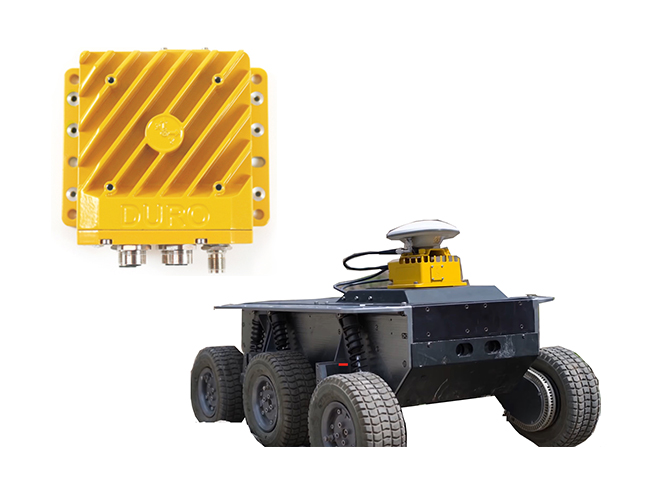
Duro Inertial 제품은 충격, 진동 및 온도 등의 극한 환경에서도 동작 가능
-

연구개발
합리적인 가격으로 멀티밴드와 여러 위성들을 지원하는 고성능의 GNSS 수신기를 사용하여 연구결과의 정확성을 향상
Piksi multi 제품은 위치 정확도를 증대시키며 연구개발에 필요한 높은 품질의 데이터 가능
-

철도
가혹한 환경에서도 연속적으로 cm급의 위치 정밀도를 유지 할 수 있도록 IMU와 듀얼 GNSS + RTK가 내장
Duro Inertial 제품은 높은 위치 정확도를 보장하여 손쉽게 열차 제어 가능
-